Инженеры Стэнфордского университета создали прототип сильной роборуки, которую также научили перемещать хрупкие предметы. Об этом сообщает издание New Scientist.
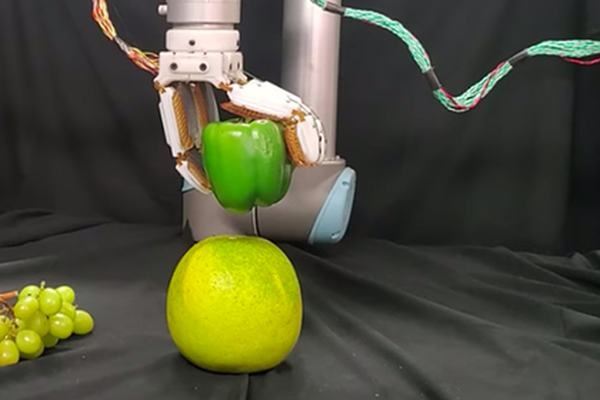
Фото: bdmlstanford / YouTube bdmlstanford / YouTube
Ведущий участник исследования Марк Каткоски (Mark Cutkosky) объяснил, что манипуляторы промышленных роботов хорошо подходят для грубого взаимодействия, однако их нельзя использовать при более деликатной работе. Ученый изобрел роборуку, которая позволит выполнять действия, требующие аккуратного прикладывания силы. В качестве примера специалист привел вкручивание лампочки, перекладывание яиц и сбор винограда.
Каткоски предложил использовать руку с четырьмя роботизированными пальцами, на создание которых его вдохновило изучение лап гекконов. Благодаря своим лапам ящерицы могут удерживать груз во много раз превосходящий их вес. Инженеры создали специальную резиновую кожу, которая при контакте с предметом практически прилипает к его поверхности. Материал равномерно распределяет нагрузку роборуки, благодаря этому сохраняется целостность предметов.
Роборука запрограммирована на захват таким образом, чтобы максимально увеличить площадь контакта, используя подушечки, а не кончики пальцев. Также из-за того, что каждый палец имеет отдельный двигатель, рука может поднять и переместить груз, который в несколько раз превышает ее вес.
В июле специалисты из Калифорнийского университета в Риверсайде создали мягкого робота и научили его играть на пианино. Принцип работы мягкого «робота-пианиста» заключается в нажатии конкретной клавиши музыкального инструмента в определенный момент времени.
Источник: rambler.ru